近日,大地测量领域顶刊《GPS Solutions》(IF=4.9)在线发表我室李必军教授团队研究成果。论文题为“A LiDAR-INS-aided geometry-based cycle slip resolution for intelligent vehicle in urban environment with long-term satellite signal loss” (一种面向长时间卫星信号丢失下的基于LiDAR-INS的GPS/BDS周跳修复方法),张红娟副研究员为第一作者,合作者包括李必军教授、刘晖教授、钱闯副研究员和李文卓助理研究员。
周跳探测与修复一直是GPS/BDS载波观测数据处理中的棘手问题,如果周跳未能被准确探测到或未得到有效修复,模糊度会难以固定并严重影响GPS/BDS定位精度。目前组合导航通常通过INS估计相邻历元的相对位移反算出载波相位观测值中的整周变化,但是INS只能在短时间能提供高精度相对位移,这种方法只能应用在短时间内的周跳修复,而对于长时间卫星信号中断下的周跳修复无能为力。智能车辆不仅搭载了组合导航设备,还会搭载LiDAR、相机等感知设备,为周跳探测与修复带来了新思路。
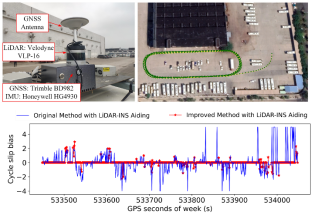
李必军教授课题组提出了一种改进的基于几何结构的历元间差分模型,顾及了前一时刻的定位误差和卫星几何变化的影响,利用LiDAR滑动窗口构建点云地图与INS进行融合定位,基于改进的差分模型和LiDAR-INS的高精度相对定位结果,提出了一种阻尼LAMBDA方法进行周跳探测与修复。实验结果证明,LiDAR-INS定位方法可以在短期信号中断(例如10秒)下实现厘米级定位精度,并在长时间中断(例如60秒)下实现分米级精度,从而可以帮助在城市遮挡环境且前一时刻的定位精度为米级的情况下,实现长时间信号中断(例如200秒)下的高固定率和成功率(例如0.85)。
重点研发项目“高精度自动驾驶动态地图与北斗卫星融合定位技术”负责人李必军教授带领的智能驾驶与机器人团队率先开展高精度地图与北斗融合定位研究,实现复杂场景下车辆连续车道级高精度定位。研究成果“A LiDAR aiding ambiguity resolution method using fuzzy one-to-many feature matching”2020年发表在大地测量顶刊《Journal of Geodesy》(IF=4.4);成果“A LiDAR-intensity SLAM and loop closure detection method using an intensity cylindrical-projection shape context descriptor”2023年发表在地球科学领域顶刊《International Journal of Applied Earth Observation and Geoinformation》(IF=7.5);成果“顾及通信延迟的车路协同高精度定位”2024年发表在《测绘学报》。研究成果已成功应用于东风、广汽、中移等多家企业。
相关论文链接:
1)A LiDAR–INS-aided geometry-based cycle slip resolution for intelligent vehicle in urban environment with long-term satellite signal loss,https://doi.org/10.1007/s10291-023-01597-0
2)A LiDAR aiding ambiguity resolution method using fuzzy one-to-many feature matching, https://doi.org/10.1007/s00190-020-01426-z
3)A LiDAR-intensity SLAM and loop closure detection method using an intensity cylindrical-projection shape context descriptor , https://doi.org/10.1016/j.jag.2023.103419
4)顾及通信延迟的车路协同高精度定位,http://xb.chinasmp.com/CN/10.11947/j.AGCS.2024.20220626

