(通讯员:葛英伟)近日,郭丙轩和肖雄武课题组在基于无人机倾斜影像的水域自动修复及场景高精度三维重建中取得进展,相关成果于2024年2月在测绘遥感领域中科院一区期刊International Journal of Digital Earth(《国际数字地球学报》)发表。
论文题为“Full-automatic high-precision scene 3D reconstruction method with water-area intelligent complementation and mesh optimization for UAV images”(具备水域智能补全和Mesh优化功能的无人机多视影像全自动高精度场景三维重建方法)。郭丙轩教授、博士生葛英伟为共同第一作者,肖雄武副研究员为通讯作者。
摄影测量技术利用光学影像捕捉地表特征及其空间坐标,通过深入分析与细致处理这些影像,实现对地形、地物及其相互间空间关系的精确测量。特别地,倾斜摄影测量技术能够从多个视角对现实世界进行立体化数字重构。
快速且高精度的城市场景三维建模是数字地球和智慧城市的重要基础数据。然而,由于水体区域自动匹配困难、获取数据多余观测不足等因素,导致现有全自动三维建模方法重建出来的实景三维模型常常具有水域缺失、模型中存在较多孔洞和局部模型精度低等问题。
为了克服上述挑战,课题组提出了一种具备水域智能补全、深度图和Mesh自动优化功能的无人机多视影像全自动高精度场景三维重建方法。首先,使用SfM计算影像高精度位姿,再对去畸变影像使用PatchMatch生成初始深度图。其次,对去畸变影像使用简化的GAN网络快速提取水域Mask,并利用摄影测量和光线追踪原理来迭代实现对初始深度图中水域深度值的高精度自动补全。第三,对水域及周边区域采用全连接的CRF算法进行深度图优化。第四,使用基于聚类剔除和深度最小二乘的深度图融合方法进行点云融合,获得场景高精度三维点云。然后,对三维点云生成满足Delaunay规则的三维三角网Mesh,再使用相似测度法线和顶点梯度优化算法生成优化后的三维表面模型Mesh。最后,对Mesh进行三维纹理映射,从而全自动生成了无水域缺失情况的高精度场景三维模型。对多套不同类型的实验数据进行实际测试,实验结果表明:与当前国际上较为先进的ContextCapture软件相比,本文提出方法的模型完整度提升了14.3%,平均精度提升了14.5%,处理效率提升了63.6%。
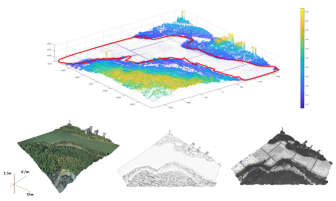
图1 水域场景全自动三维建模示意图
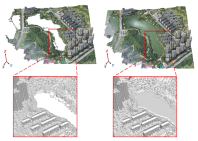
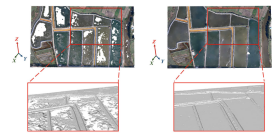
图2 本文方法(右)与ContextCapture(左)的实验效果对比
此项技术为城市场景水域自动修复及三维表征、三维模型的自动优化提供了技术参考,在全自动化的高完整度高精度城市三维建模中展现出了较大的潜力与价值,对于提升城市三维模型的完整性、提高场景三维模型的视觉吸引力和功能实用性发挥了积极作用,将为实景三维中国、智慧城市等领域提供重要技术支撑。
这项研究受国家自然科学基金、国家重点研发计划、湖北省自然科学基金等项目的资助。
论文链接:https://doi.org/10.1080/17538947.2024.2317441

